Промышленные роботы манипуляторы Российского производства
Назначение
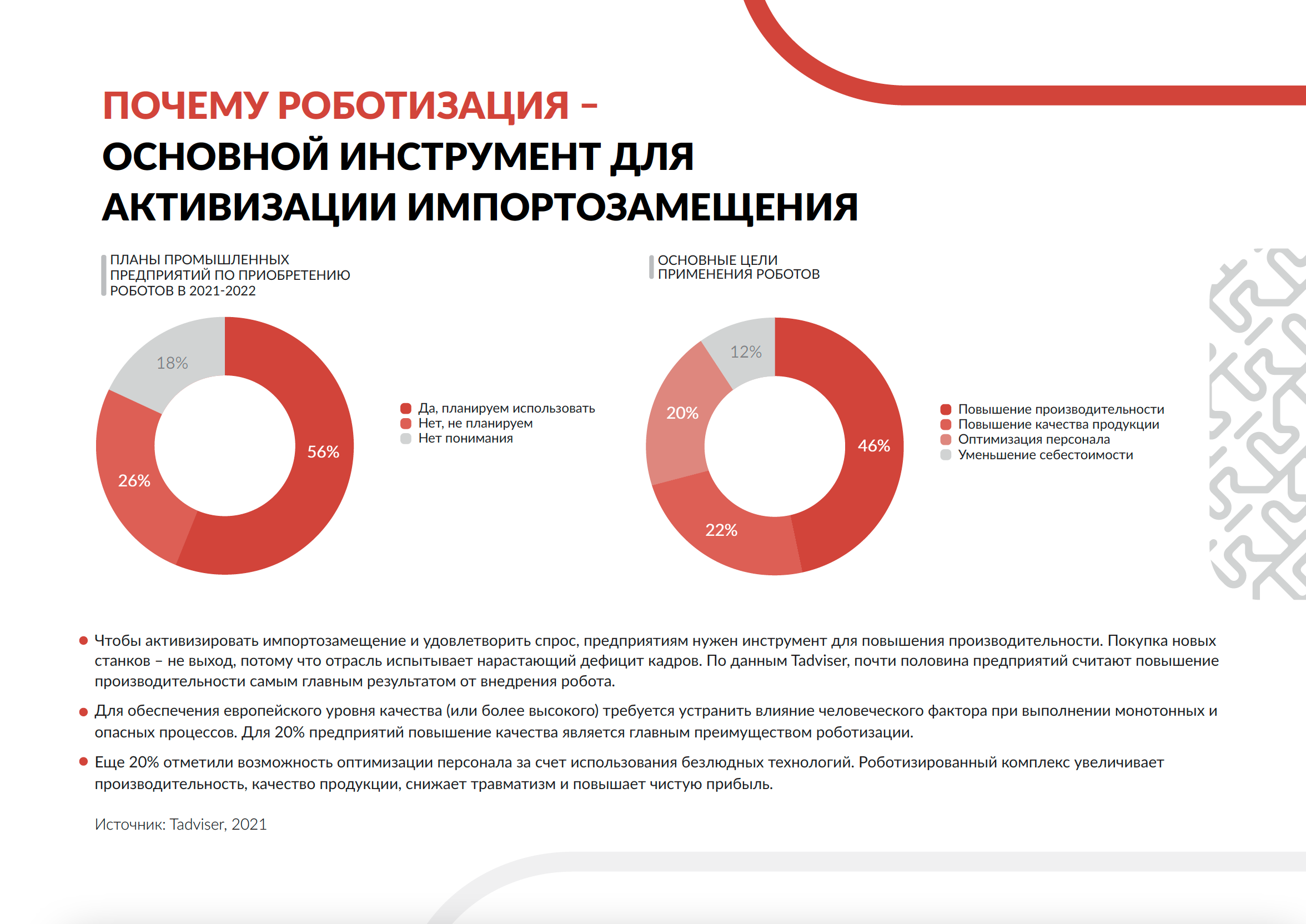
Шести осевые промышленные роботы манипуляторы предназначены для замены низкоквалифицированного ручного труда, сокращения брака, повышения производительности и снижения себестоимости выпускаемой продукции.
Роботы манипуляторы применяются практически во всех отраслях промышленности. Операции по сварке изделий, загрузки станков с ЧПУ, паллетированию, сборки, нанесению клея и герметика, шлифовки и полировки, ОТК, 3D-сканированию, работы с опасными материалами и т.д. подлежат автоматизации в металлобрабатывающей, фармацевтической, пищевой, автомобильной и деревообрабатывающей промышленности.
Промышленный робот
ТР 1835-С
ТР 1835-С
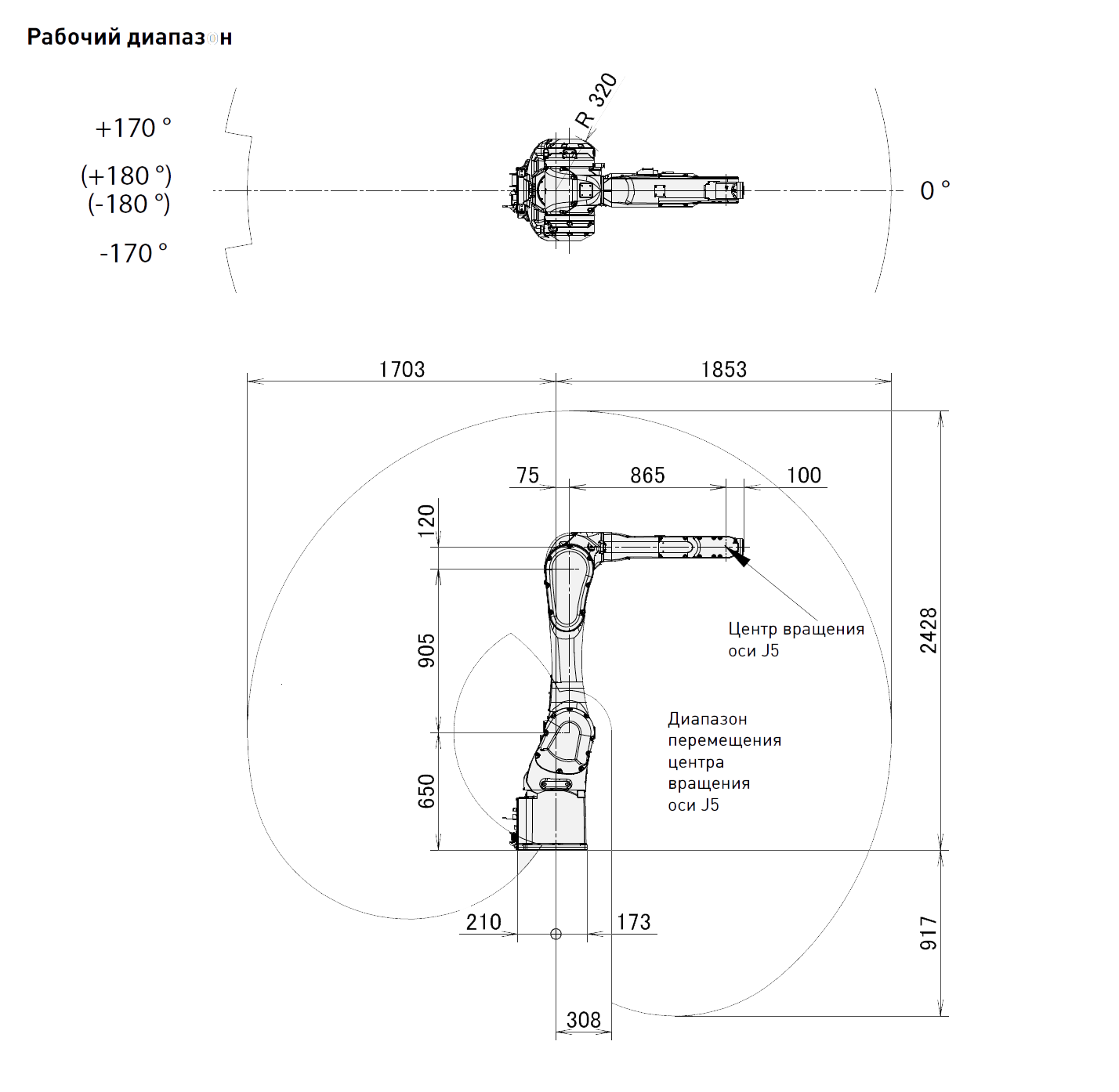
зона досягаемости......................................................1 835 мм
кол-во систем безопасности...................................................8
максимальная нагрузка....................................................35 кг
кол-во осей.................................................................................6
повторяемость позы.....................................................0,05 мм
класс защиты......................................................................IP 67
встроенные коммуникации...............................................8 шт
потребляемая мощность.......................................380 В, 8 кВт
вес........................................................................................120 кг
кол-во систем безопасности...................................................8
максимальная нагрузка....................................................35 кг
кол-во осей.................................................................................6
повторяемость позы.....................................................0,05 мм
класс защиты......................................................................IP 67
встроенные коммуникации...............................................8 шт
потребляемая мощность.......................................380 В, 8 кВт
вес........................................................................................120 кг
Промышленный робот
ТР 1300-Б
ТР 1300-Б
зона досягаемости......................................................1 300 мм
кол-во систем безопасности.................................................16
максимальная нагрузка....................................................15 кг
кол-во осей.................................................................................6
повторяемость позы.....................................................0,05 мм
класс защиты......................................................................IP 54
встроенные коммуникации.............................................10 шт
потребляемая мощность.......................................220 В, 3 кВт
вес..........................................................................................35 кг
кол-во систем безопасности.................................................16
максимальная нагрузка....................................................15 кг
кол-во осей.................................................................................6
повторяемость позы.....................................................0,05 мм
класс защиты......................................................................IP 54
встроенные коммуникации.............................................10 шт
потребляемая мощность.......................................220 В, 3 кВт
вес..........................................................................................35 кг
План
развития
2022г.
Формирование команды. Научно-исследовательские и опытно-конструкторские работы.
2023г.
Создание прототипа. Тестирование и отладка механической части. Доработка ПО.
2024г.
Выпуск серийных моделей. Строительство производственных мощностей на 5 000 роботов в год.
2025г.
Серийный выпуск промышленных манипуляторов. Выход на международные рынки.
Общая информация